Мы запускаем камеру на смартфоне, наводим на объект и видим маленькую иконку внизу. Смартфон понимает — что именно мы снимаем. Вы когда-нибудь задумывались, как это работает?
Беспилотные автомобили спокойно объезжают машины и тормозят перед пешеходами, камеры видеонаблюдения на улицах распознают наши лица, а пылесосы отмечают на карте, где лежат тапочки — всё это не чудеса. Это происходит прямо сейчас. И всё благодаря компьютерному зрению.
Поэтому сегодня разберем, как работает компьютерное зрение, чем оно отличается от человеческого и чем может быть полезно нам, людям?
Для того чтобы хорошо ориентироваться в пространстве человеку нужны глаза, чтобы видеть, мозг, чтобы эту информацию обрабатывать, и интеллект, чтобы понимать, что ты видишь. С компьютерным или, даже вернее сказать, машинным зрением, такая же история. Для того, чтобы компьютер понял, что он видит, нужно пройти 3 этапа:
- Нам нужно как-то получить изображение
- Нам нужно его обработать
- И уже только потом проанализировать

Пройдёмся по всем этапам и проверим, как они реализованы. Сегодня мы будем разбираться, как роботы видят этот мир, и поможет нам в этом робот-пылесос Roborock S6 MaxV, который напичкан современными технологиями компьютерного зрения.
Этап 1. Получение изображения
В начале компьютеру надо что-то увидеть. Для этого нужны разного рода датчики. Насколько много датчиков и насколько они должны быть сложные зависит от задачи. Для простых задач типа детектора движения или распознавания объектов в кадре достаточно простой камеры или даже инфракрасного сенсора.
В нашем пылесосе есть целых две камеры, они находятся спереди. А вот, например, для ориентации в трехмерном пространстве понадобятся дополнительные сенсоры. В частности 3D-сенсор. Тут он тоже есть и расположен сверху. Но что это за сенсор?
LiDAR
Вообще с названиями 3D-сенсоров есть небольшая путаница, одно и тоже часто называют разными словами.
Эта штука сверху — называется LDS или лазерный датчик расстояния, по-английски — Laser Distance Sensor. Подобные датчики вы наверняка могли заметить на крышах беспилотных беспилотных автомобилей. Это не мигалка, это лазерный датчик расстояния, такой же как на роботе пылесосе.
Вот только в мире беспилотников такой сенсор принято называть лидаром — LIDAR — Light Detection and Ranging. Да-да, как в новых iPhone и iPad Pro.


А вот в Android-смартфонах вместо лидаров используется термин ToF-камера: ToF — Time-of-flight.
Но, как ни называй, все эти сенсоры работают по одному принципу. Они испускают свет и замеряет сколько ему понадобится времени, чтобы вернуться обратно. То есть прямо как радар, только вместо радиоволн используется свет.
Есть небольшие нюансы в типах таких сенсоров, но смысл технологии от этого не меняется. Поэтому мне, чисто из-за созвучия с радаром, больше всего нравится название LiDAR, так и будем называть этот сенсор.
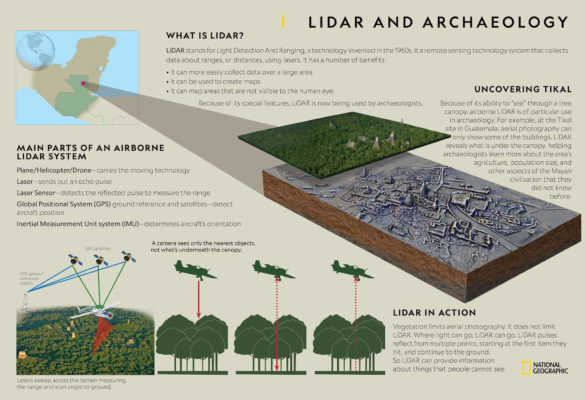
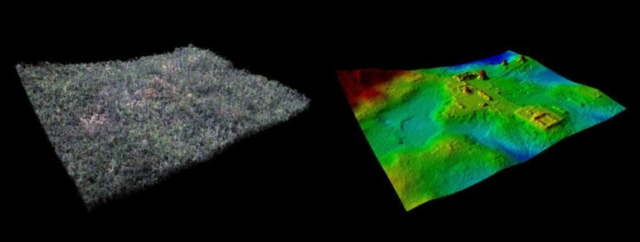
Кстати, лидары использует не только в задачах навигации. Благодаря лидарам сейчас происходит настоящая революция в археологии. Археологи сканируют территорию с самолета при помощи лидара, после чего очищают данные ландшафта от деревьев. И это позволяет находить древние города, скрытые от глаз человека!

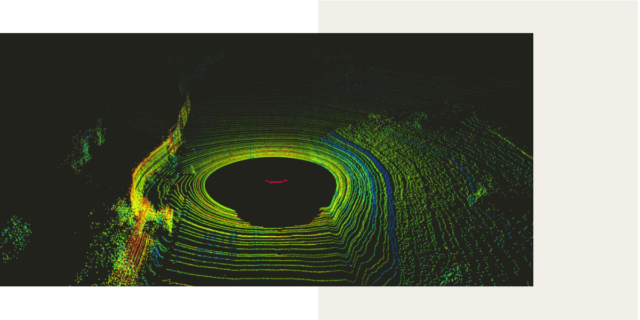
Также помимо статических лидаров, направленных в одну сторону, бывают вращающиеся лидары, которые позволяют сканировать пространство вокруг себя на 360 градусов. Такие лидары используется в беспилотных автомобилях, ну и в этом роботе-пылесосе.
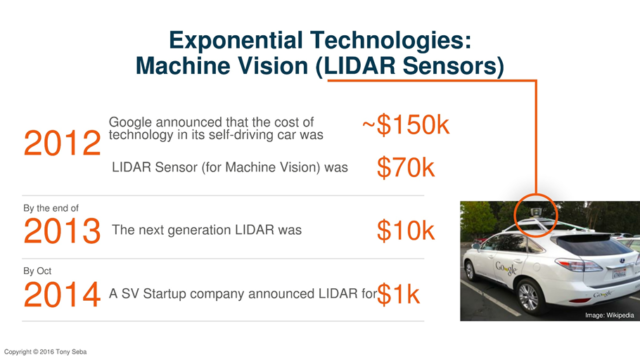
Еще 8 лет назад такие сенсоры стоили каких-то невероятных денег, под 100 тысяч долларов. А теперь у вас по дому может спокойно ездить маленький беспилотник.
Лидар в пылесосе
Окей, тут лидар используется для построения карты помещения и это не новая история. Такую технологию мы видели еще года 3-4 назад.
Благодаря лидару и построенной карте, пылесос ездит не рандомно как скринсейвер в Windows, стукаясь об углы, а аккуратно проезжая всю площадь (модели без лидаров обычно катаются странно).
Но внутри пылесоса стоит, на секундочку, восьмиядерный Qualcomm Snapdragon 625 (Qualcomm APQ8053), поэтому у него хватает мозгов не только построить карту, но и ориентироваться по ней.
Более того пылесос может хранить в памяти до четырёх карт и распознаёт этажи. Это существенно ускоряет уборку. Потому при переносе с этажа на этаж пылесос это может поять и не тратит время, чтобы построить карту заново.

Также каждую из 4 карт можно поделить на 10 специальных зон. Для которых можно настроить свои параметры уборки: мощность всасывания (до 2500 Па), количество проходов и прочее. А куда-то можно вообще запретить ездить. Можно даже выбирать сухую и влажную уборку для разных зон. Правда для этого не нужно подключать/отключать отдельный резервуар с водой. И всё это стало возможно благодаря лидару.
Тем не менее у технологии есть некоторые недостатки — очень разреженные данные. Пространство сканируется линиями. В больших автомобильных радарах разрешение — от 64 до 128 линий. Плюс ко всему у лидар есть мертвая зона. Если лидар стоит на крыше — то он не видит, что творится в достаточно большом радиусе вокруг него.
Также в роботе-пылесосе лидар тут сканирует пространство всего одним лучом. Поэтому, всё что он видит — это тонкая линия на высоте где-то 9-10 сантиметров от пола. Это позволяет определять где стены и мебель, но он не видит того, что валяется на полу.
Две камеры

Поэтому, чтобы исправить этот недочет лидаров. как в автомобили, так и в пылесосы ставят дополнительные камеры. Тут камеры сразу две, и они обеспечивают стереоскопическое зрение. Да-да, у пылесоса всё как у людей — два глаза.
Две камеры, во-первых, позволяют убрать мертвую зону впереди пылесоса. А во вторых позволяют достаточно точно определять расстояние до валяющихся на полу предметов.
Это позволяет пылесосу обнаруживать предметы размером не менее 5 см в ширину и 3 см в высоту и объезжать их.
Этап 2. Обработка
Итак, мы получили достаточно данных с различных сенсоров. Поэтому переходим ко второму этапу компьютерного зрения — обработке.
Данные с лидара мы получаем в виде трехмерного облака точек, которые фактически не нуждаются в дополнительной обработке.
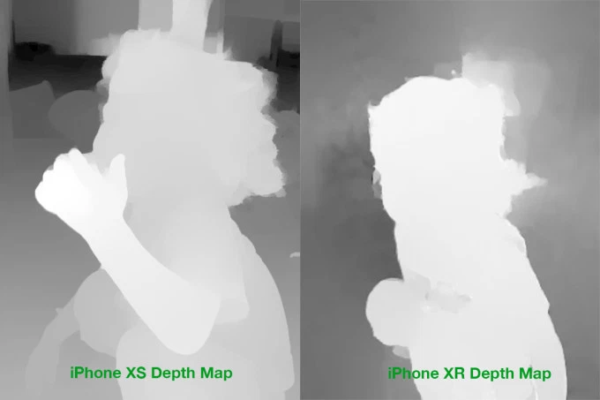
Как получить стерео с двух камер тоже понятно — высчитывается разница между изображениями снятыми чуть под разным углом и так строится карта глубины. Это несложно.
Но вот совместить данные с разных сенсоров — это нетривиальная задача.
Например, пылесос на полу обнаружил какой-то предмет. Дальше ему нужно понять где именно он находится на карте построенной при помощи лидара. А также нужно предположить какие у него габариты по проекции с одной стороны. То есть нам нужно поместить предмет в некий объёмный куб правильного размера.
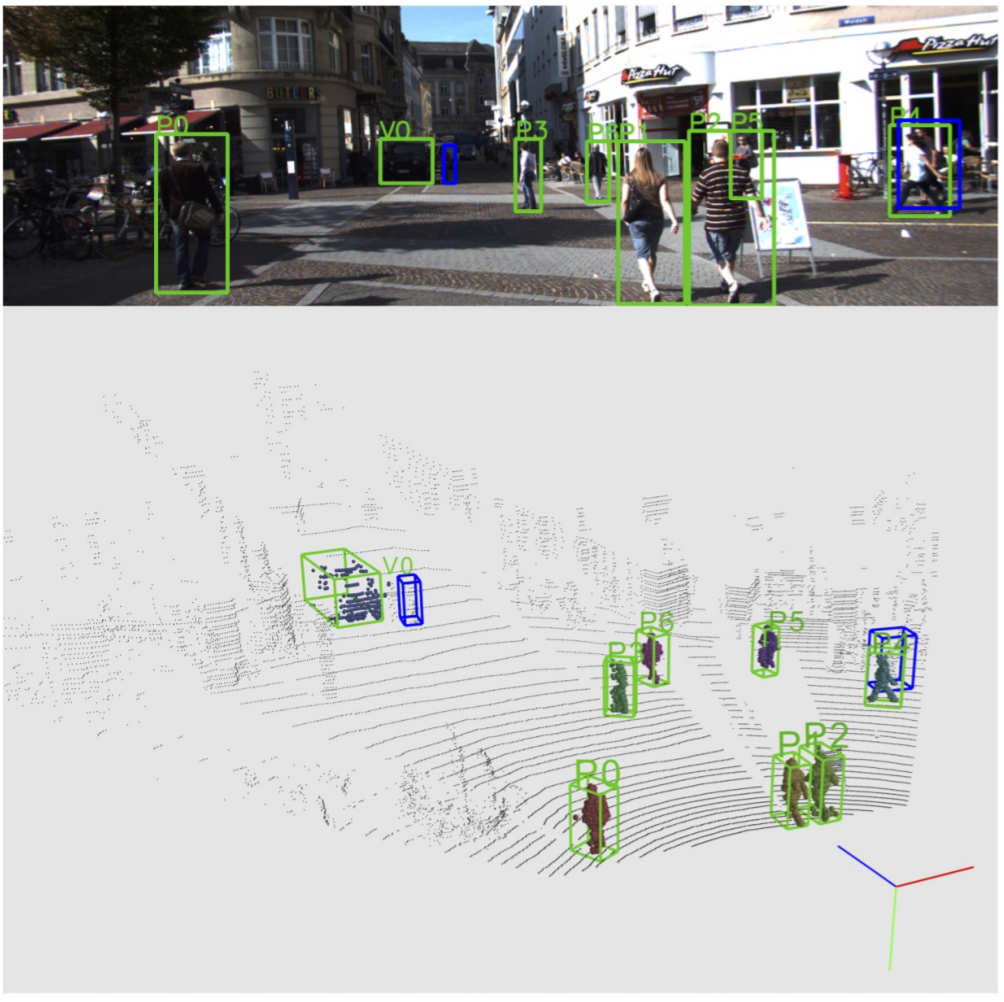

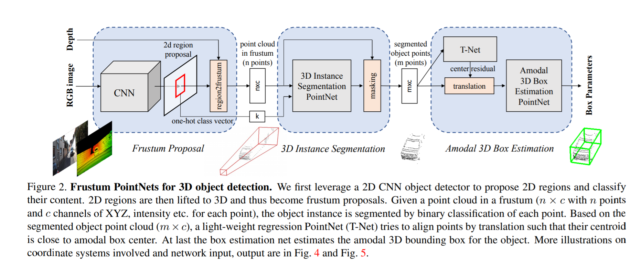
Эту задачу можно решить разными способами. Один из способов называется “усеченная пирамида”. Сначала на камере обнаруживаются предметы. Потом эти предметы помещаются в конус, а объем этого конуса вычисляется нейросетью.

Поэтому даже, казалось бы, такая тривиальная задача требует серьёзных вычислений и решается при помощи нейросетей.
А раз мы заговорили про нейросети, значит мы уже немного зашли на 3-й этап компьютерного зрения — анализ.
Этап 3. Анализ
За распознавание, сегментацию и классификацию объектов на изображении в современном мире в основном отвечают нейросети. Мы даже делали подробный ролик о том как это работает, посмотрите.
Если кратко, нейросеть — это такое большое количество уравнений, связанных между собой. Загружая в нейросеть любые данные — ты обязательно получишь какий-то ответ.
Но, например, если постоянно загружать в нейросеть фотографии кошечек, и указать ей, что ответ должен быть — кошка. В какой-то момент, нейросеть перестает ошибаться на обучающей выборке. И тогда ей начинают показывать новые незнакомые изоражения и если на них она тоже безошибочно определяет кошек — нейросеть обучена.
Дальше нейросеть оптимизируется для того, чтобы она стала меньше, быстро работала и не жрала много ресурсов. После этого она готова к использованию.
Что-то похожее происходит с нейронными связями в человеческом мозге. Когда мы чему-то учимся или запоминаем, мы повторяем одно и то же действие несколько раз. Нейронные связи в мозге постепенно укрепляются и потом нам это легко даётся!
Например, в данном пылесосе за работу нейросети отвечает встроенный NPU-модуль. Всё-таки внутри Snapdragon, пылесос может себе такое позволить.
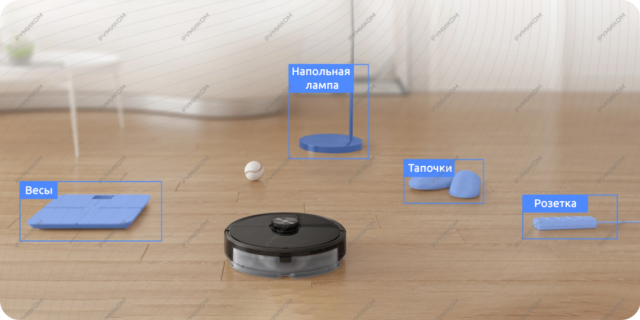
Нейронка предобучена определять различные предметы домашнего обихода: игрушки, тапочки, носки, всякие удлинители, зарядки и даже неожиданности от домашних животных.
Распознавание предметов происходит при помощи гугловской библиотеке Tensorflow. Алгоритм самообучается и умнеет от уборки к уборке.
Практика
В Roborock технология распознавания называется Reactive AI. Мы протестировали насколько она хорошо работает на практике.
Кайфовая штука, что все найденные предметы пылесос отмечает не карте. Поэтому теперь, я не обещаю, но такое возможно, вы всё-таки обнаружите логово пропавших носков.
Проследить за тем, что видит пылесос всегда можно через фирменное приложение или Mi Home от Xiaomi. Можно даже просто кататься по дому управляя пылесосом слать на него голосовые сообщения. Управлять пылесосом можно также через Google Ассистента или Алису. Всё на русском языке.
С недавних пор бренд начал официально продаётся в России, поэтому устройства полностью локализованные.
Внутри кстати стоит батарейка на 5200 мАч, которая способна выдержать до 3 часов уборки.
Итоги

Ребят, ну вы сами всё видели. Правда, стоит обратить внимание, что пока корректное распознавание предметов работает только если запускать пылесос через приложение Roborock. И это нюанс, поскольку оно пока недоступно в Play Market Россия. Но в течение нескольких месяцев оно появится, а пока его можно скачать и установить в виде apk-файла.
