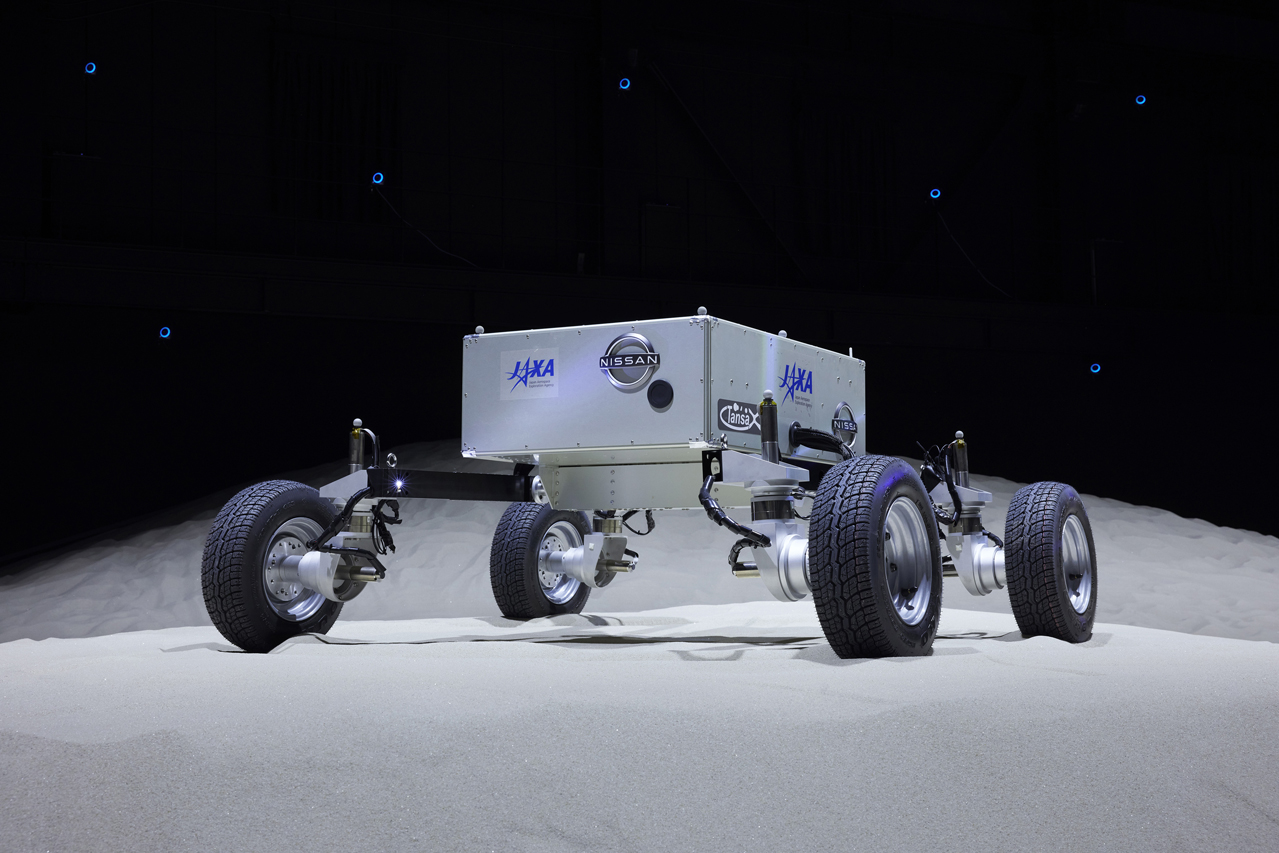
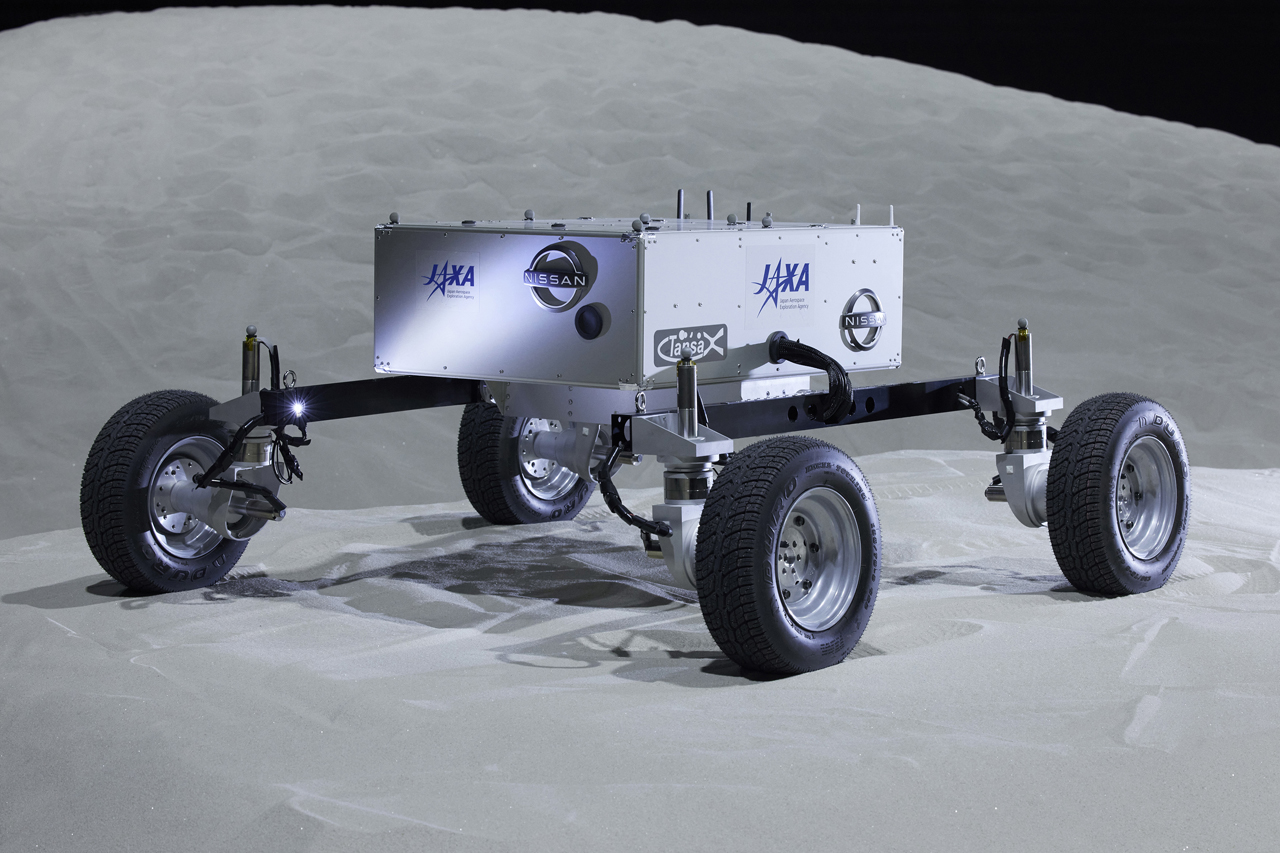
Nissan представил Lunar Rover, разработанный совместно с Японским агентством аэрокосмических исследований (JAXA).
Lunar Rover оснащен двумя электрическими двигателями — спереди и сзади — и использует технологию управления всеми колесами e-4ORCE.
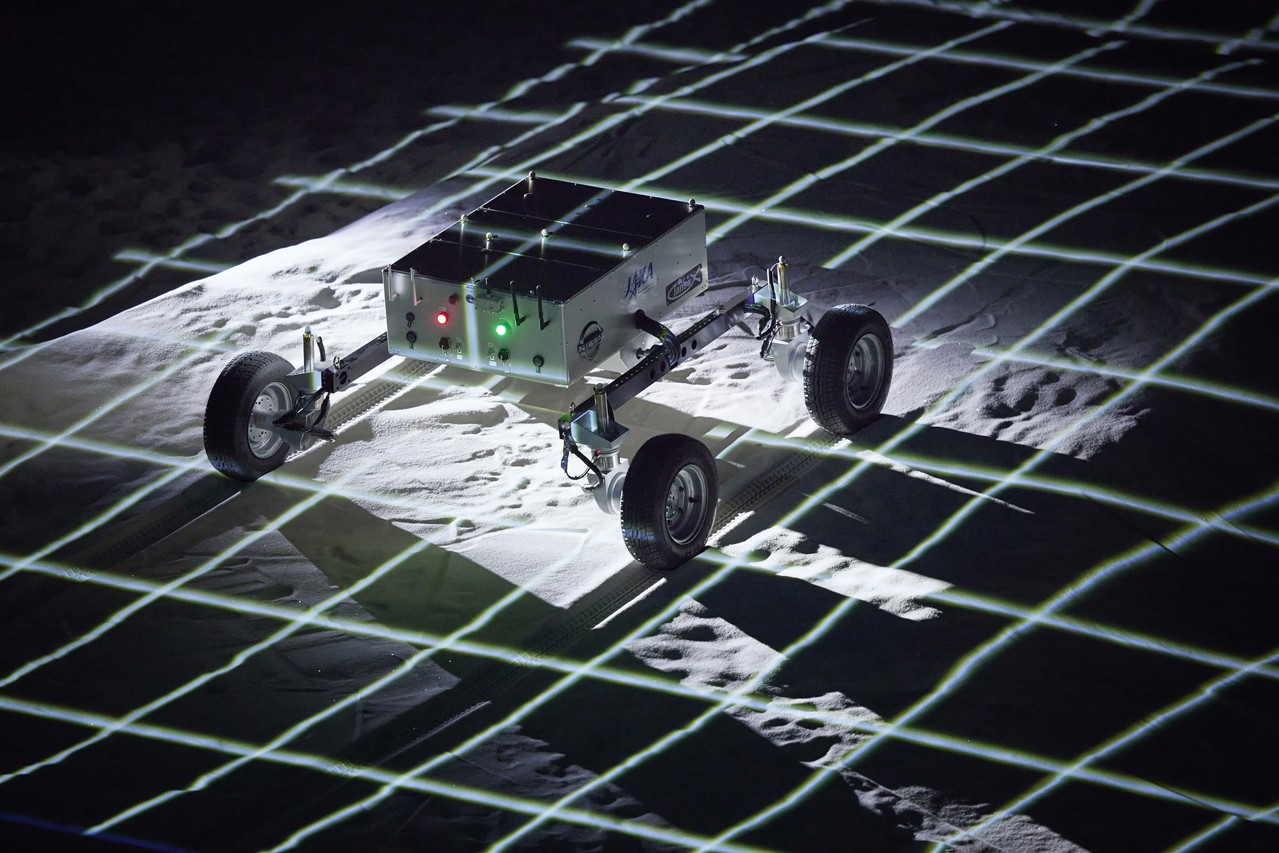
Эта технология поможет Lunar Rover управлять ровером на пыльном и коварном рельефе Луны, что, в свою очередь, будет использовано для того, чтобы помочь реальным автомобилям справиться с аналогичными условиями, например, при езде по песку.

Как объясняет Nissan в своем пресс-релизе, «когда автомобили едут по песку, их колеса часто прокручиваются и зарываются, препятствуя движению. Чтобы не застрять, требуется высокий уровень мастерства водителя.
Чтобы удовлетворить эту потребность, Nissan разработал систему управления усилием, которая минимизирует пробуксовку колес в зависимости от состояния поверхности».

Более того все четыре колеса, независимые друг от друга, позволяют при прохождении поворотов работать в сочетании со скоростью и точностью, что обеспечивает лучшую управляемость на рыхлых поверхностях, таких как Лунный грунт в космосе или грязь и песок здесь, на Земле.
В результате нужное количество тяги направляется на нужное колесо, что, в свою очередь, позволяет «водителям любого уровня подготовки уверенно ориентироваться в различных дорожных условиях, включая дождь и снег».
