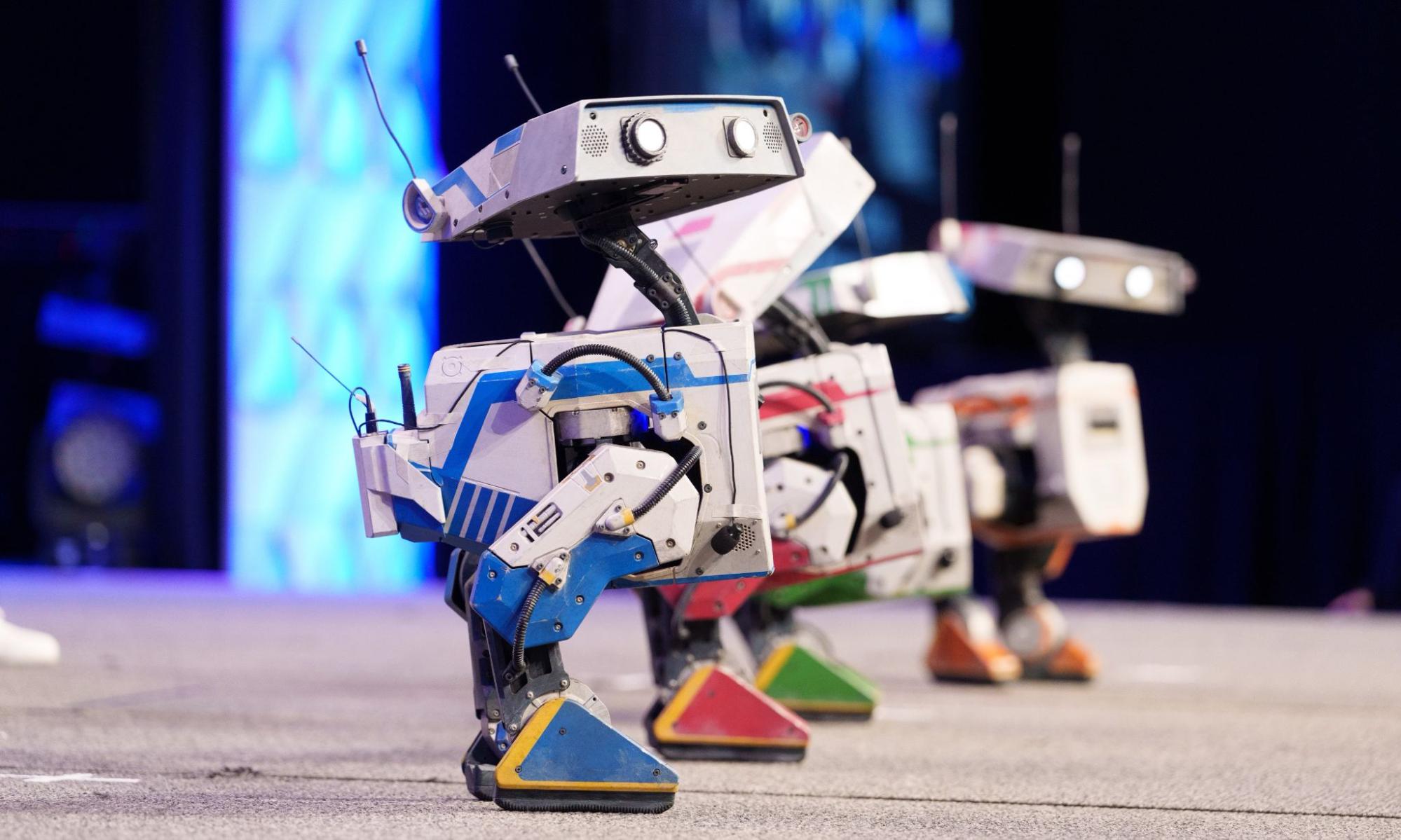
Знакомьтесь — это BDX Droid, милый двуногий робот из вселенной «Звёздных войн», которого зовут Бэш. Вы могли видеть его на презентации NVIDIA GTC в марте 2025 года, где он сканировал зрителей и вызвал всеобщий восторг.

Бэш и его друзья — Грик, Оскар и странный красный Рэд — уже больше года развлекают посетителей в Star Wars: Galaxy’s Edge. Они сканируют предметы, взаимодействуют с людьми, преследуют уток и даже снимаются в фильмах, как рассказал режиссёр Джон Фавро.
Роботы не просто машины, а настоящие персонажи с характером, которые эволюционируют на глазах: они держат баланс, преодолевают препятствия и выглядят живыми. Это прорыв в робототехнике, созданный не Boston Dynamics или Tesla, а Disney.
Папа Карло нашего времени
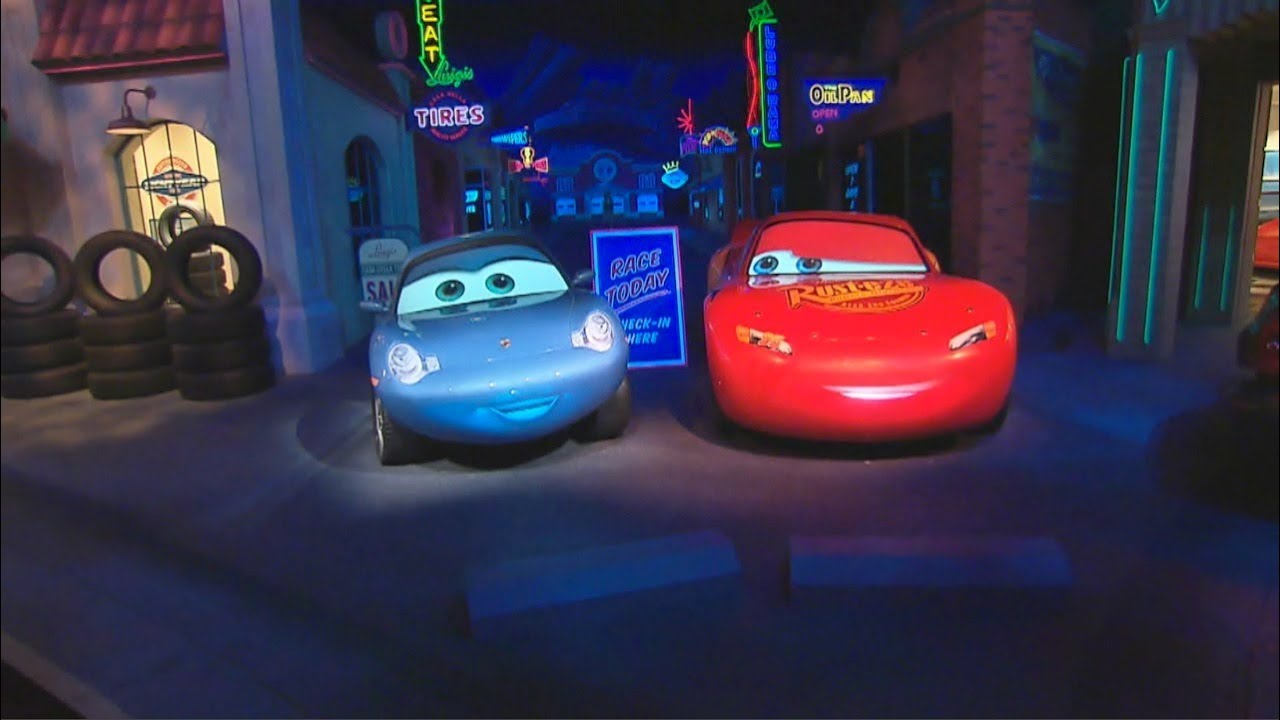
Disney давно занимается робототехникой — уже более 60 лет они создают механические фигуры для парков развлечений. За это отвечает подразделение Disney Imagineering, лаборатория, где сочетаются магия и технологии. Этот отдел разрабатывают самые передовые аниматроники в мире: персонажи выглядят так, будто сошли с экрана. Например, Нав’и из «Аватара» или Молния Маккуин из «Тачек» — они двигаются и выглядят реалистично, словно только что приехали с соревнований.

Но аниматроники — это всё же статичные куклы с повторяющимися движениями, пусть и идеально отточенными. BDX-дроиды — совсем другое: эти «утята» на электроприводах преодолевают препятствия, выдерживают толчки и ориентируются в пространстве. Здесь нужна не только анимация, но и серьёзная наука с инженерией.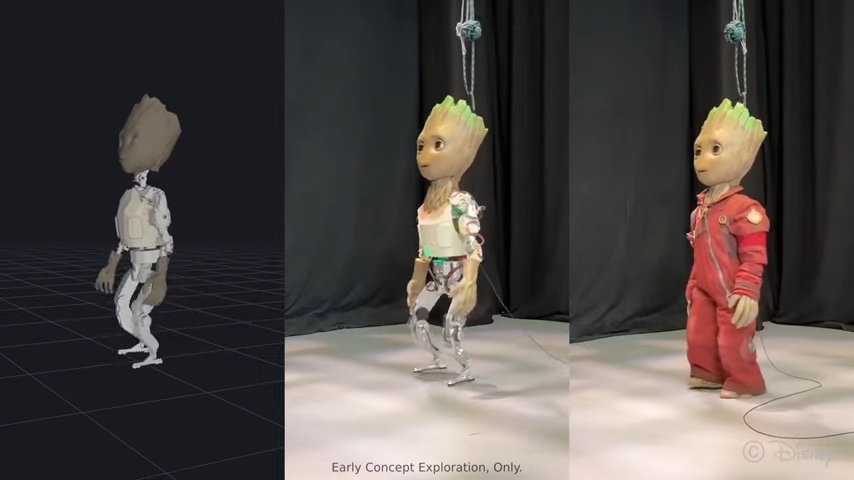
Для разработки привлекли Disney Research — научное подразделение, где работают настоящие «Папы Карло». Они оживили даже Грута из «Стражей Галактики», сделав его милым и подвижным. Disney Research занимается всем интересным: от алгоритмов интерполяции кадров и нейросетевой компрессии (привет, «Пегому Дудочнику») до анимации персонажей и, конечно, роботов.
BDX создали всего за менее года командой из восьми человек. Корпус напечатан на 3D-принтере, комплектующие — обычные магазинные, обучение — на одной RTX 4090. Как это удалось? Благодаря трём экспертизам: анимации, науке и аниматронике.
Три робота, новая глава
Задача была сложной: роботы обычно либо функциональные (умные, но страшные), либо эмоциональные (милые, но бесполезные, как EMO, Pepper или NAO от SoftBank). Disney нужны были оба качества: персонаж, выражающий эмоции, взаимодействующий с людьми, но способный двигаться самостоятельно — сниматься в кино, развлекать в парках или даже гулять по лесу.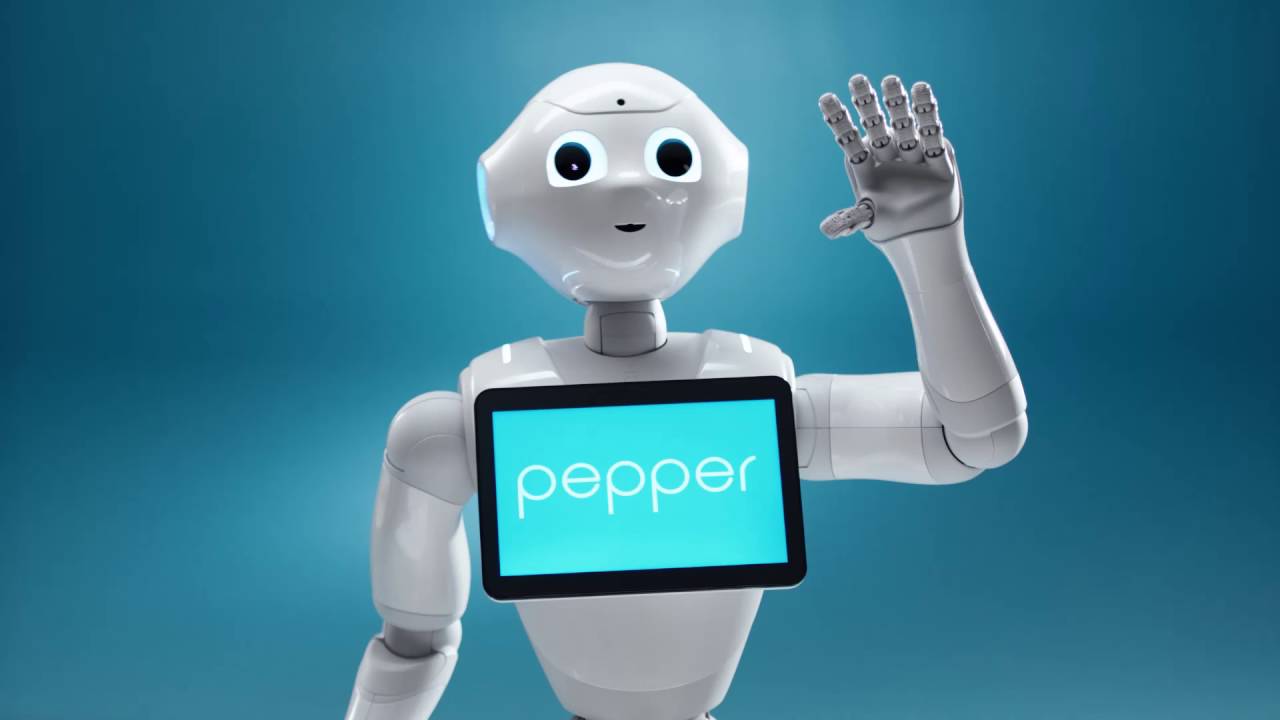

Решение — создать мультяшку и перенести её в реальность. Никто раньше этого не делал, но Disney справились благодаря экспертизе в анимации (натуральные движения), науке (обучение) и аниматронике (сборка).
Оживляем пиксели
Disney мастера в создании харизматичных 3D-персонажей, так что начали с профессионального аниматора: создали модель, риг (виртуальный скелет) и определили характер — походку, манеры.
Затем применили метод процедурной генерации походки от Disney Research. В мультиках анимация — ручная работа, но инструмент автоматизирует: создаёшь базовый шаг, задаёшь траекторию — и персонаж идёт. Меняя параметры (скорость, фаза, амплитуда), быстро генерируешь стили: быстрый бег, крадущийся дракон или хромающий динозавр. Переходы плавные.
Это не новинка — подобные технологии в играх и фильмах с 2003 года (публикация о Registration Curves). Инновация — адаптация для роботов с учётом физических ограничений.
Оживляя электронику
Робот — не мультик: есть кинематические ограничения (физика движения, шаг не шире ног, суставы не на 360°) и динамические (сила, вес, баланс, гравитация, трение).
Пока аниматоры работали, инженеры подбирали комплектующие и тестировали. В итоге: дроид высотой 66 см, весом 15,4 кг. Внутри — 5 приводов на ногу, 4 в шее, NVIDIA Jetson, IMU (мониторинг позиции), антенны, динамики, фонарики, батарея на час.
Анимация — полдела: персонаж в симуляции игнорирует физику. Нужно добавить вес, инерцию, моменты. Для этого — поместить в «Матрицу».
Обучение с подкреплением
Просто загрузить анимацию нельзя — покажите как пример, робот научится сам через Reinforcement Learning (метод «кнута и пряника»).
Идея проста:
- Копия робота и анимации в симуляции.
- Робот повторяет.
- Награда за точность и баланс.
- Штраф за резкость и падения.
Как в жизни: пример, попытки, ошибки, обучение. Но отличие — тысячи копий учатся параллельно, опыт суммируется, время ускоряется на GPU. Годы — в часы.
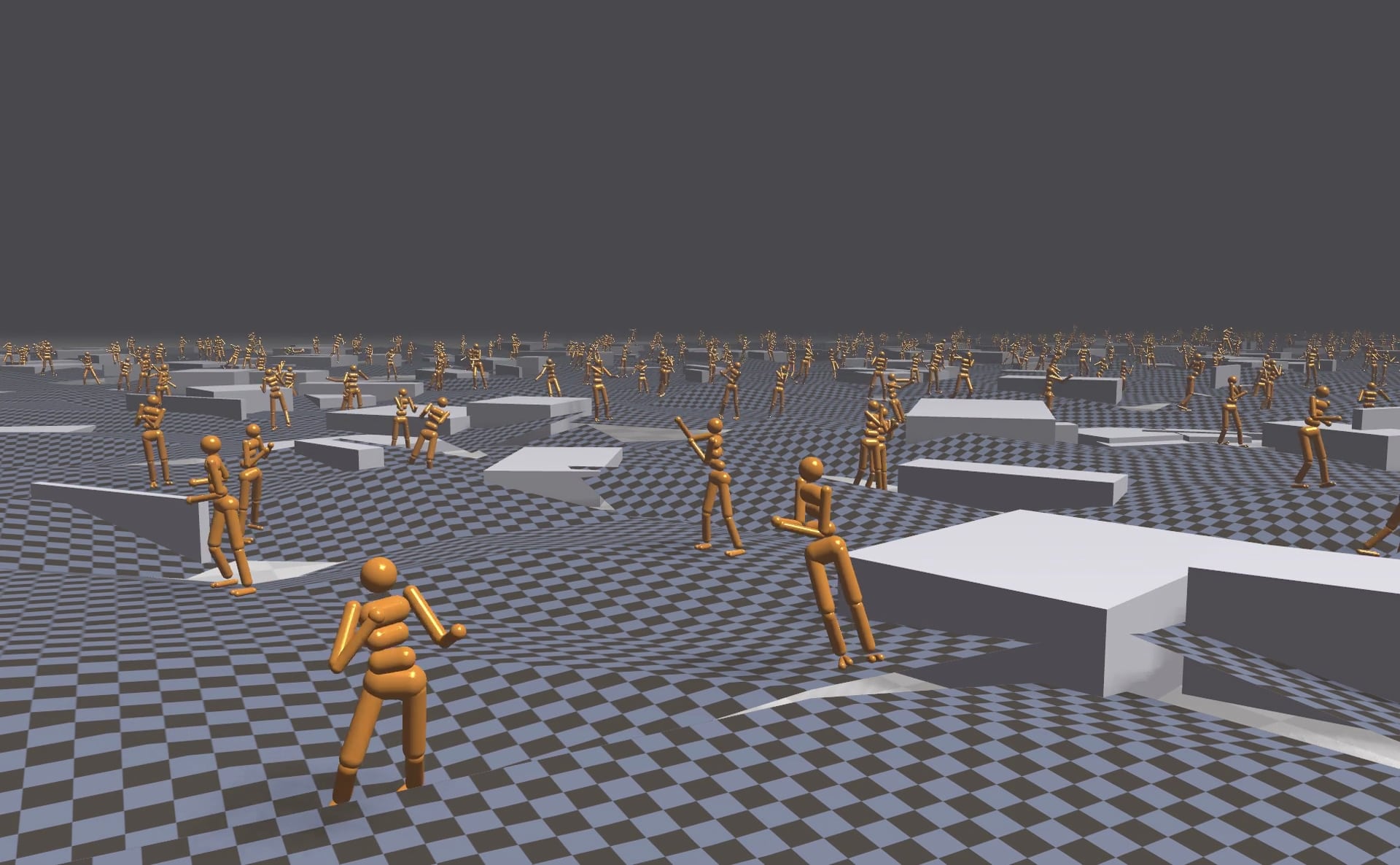
В симуляции роботы бегают, падают, встают. Полчаса — и «знает кунг-фу». Пугает!
Но есть проблема. Часто бывает так, что в симуляции ты Лев Толстой, а на деле так не получается. В науке это проблема известна как “разрыв между симуляцией и реальностью” или Sim-to-Real Gap. Преодолеть его не так-то просто. Но Disney Research смогли. Но как?
Как работает Sim-to-Real Gap?
Чтобы ожидания совпали с реальностью, в Disney Research приняли несколько крутых решений.
Первое. В симуляцию добавили реальное оборудование, установленное в роботе. А именно:
- Они воссоздали работу низкоуровневого контроллера, который управляет моторами.
- И сделали точные цифровые копии электроприводов, характеристики которых замерили заранее.
В итоге нейросеть училась управлять настоящим железом, а не просто дергать конечности «за верёвочки». Но дальше больше. Низкоуровневый контроллер не просто управляет приводами, у него есть ещё две важные функции.
- Во-первых, он сглаживает управляющие сигналы, чтобы не перегружать приводы.
- Во-вторых, он постоянно мониторит состояние приводов и положение робота в пространстве с очень высокой частотой — 600 Гц.
Это позволяет своевременно корректировать крутящие моменты, а также частично компенсировать неожиданные изменения внешней среды. Если робот оступился или его толкнули, контроллер сгладит удар за счёт жесткости приводов и демпфирования (амортизации).
А в жизни такие ситуации не редкость. Поэтому Disney приняли второе крутое решение — ввели в симуляцию случайные факторы:
- Стали добавлять шум и помехи в сенсоры.
- Менять коэффициенты трения с поверхностью.
- В конце концов, толкать робота в корпус и произвольно менять массу разных частей тела робота.
Как говорят робототехники: не ткнешь робота палкой — день прошел зря.
Это называется рандомизация среды. Такой подход подготовил робота к суровой действительности. А главное позволил добться невероятной схожести между эталонными движениями и реальностью. Но это не единственный секрет Disney Research. Мы разобрались, как учили робота. А теперь посмотрим, чему именно его учили.
Самое классное, как Disney решили проиблему с переходом от одной анимации к другой. Они использовали многослойный подход! Как это работает?
Первый слой — это фоновая анимация. Даже когда робот просто стоит на месте, он что-то делает: двигает антеннами, моргает. Этот слой смешивается с движениями от управления джойстиком, другими политиками, например ходьбой, или триггерными анимациями.
При этом все переключения очень плавные за счет фазового сигнала. Анимационный движок всегда отслеживает, в какой фазе находится текущая анимация, и смешивает разные движения только при совпадении фаз. В результате дроид выглядит как живой, а переходы между разными состояниями практически незаметны. Но стоп! Если этим дроидом управляют люди, почему мистер Хуанг со сцены говорил, что дроид автономный? Это обман?
Система Newton
На GTC Хуанг назвал дроида автономным — не обман: версия с камерами, гуляют в парках более года (с апреля 2024 в Disneyland, с июля 2025 в Disney World limited time до августа, с обновлениями для жары). Автономия: 4 настроения: застенчивый, счастливый, злой, грустный.
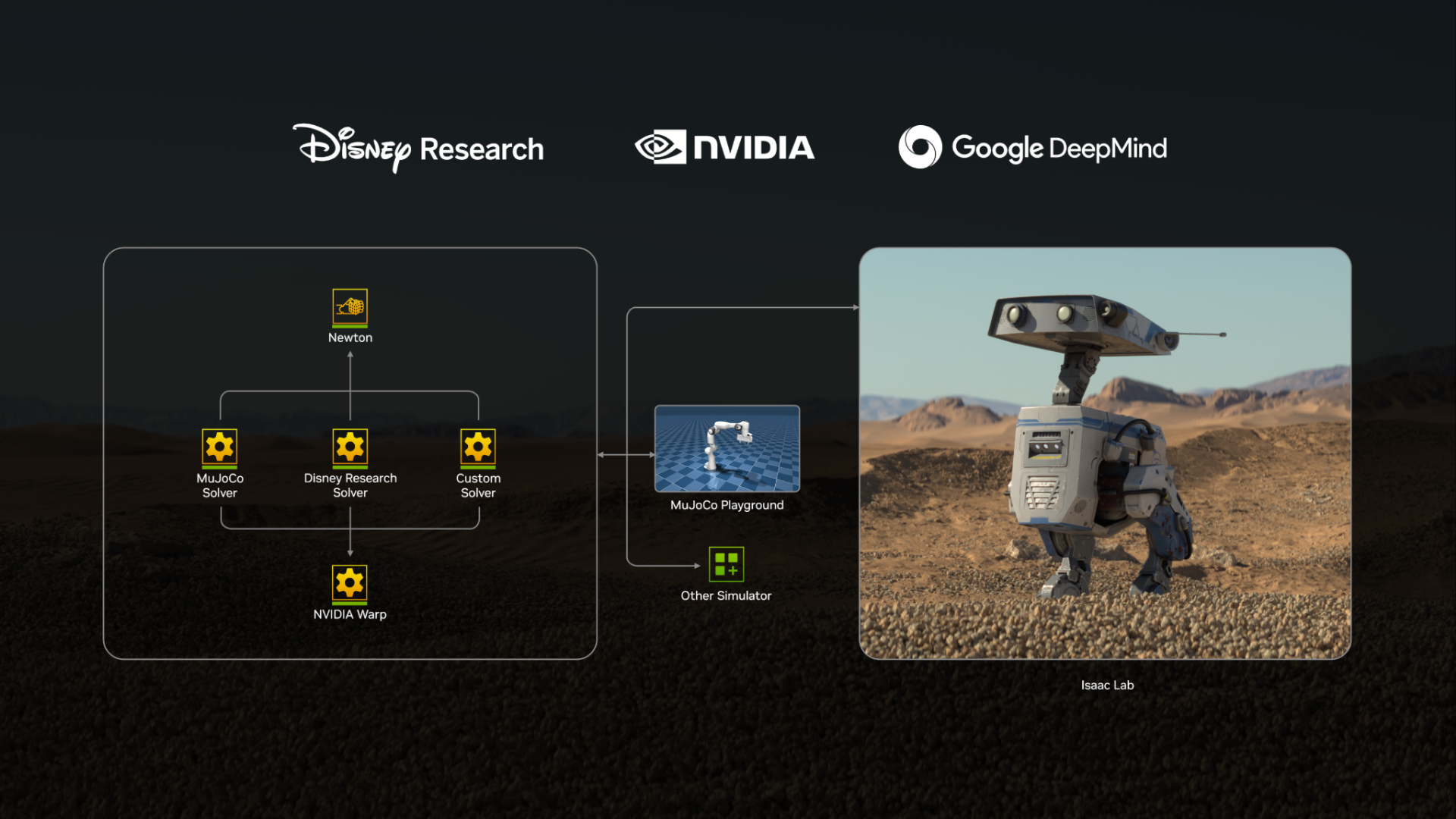
Анонс Newton, физический движок с Google DeepMind и Disney Research. Раньше симуляции на GPU упрощённые, точные — на CPU (медленно). Сам движок же просчитывает динамику тел, контакты, трение, дифференциальную физику. Стоит учитывать, что всё это на GPU. Ускорение в 70 раз для гуманоидов, в 100 раз для манипуляций. Обучение, около 100 тысяч итераций. Грубо говоря уместить 2 дня обучения в полчаса.
